SQLITE NOT INSTALLED
Что такое асинхронный электродвигатель, история появления. Устройство и принцип действия асинхронных двигателей с короткозамкнутым и фазным ротором. Преимущества и недостатки.
Определение и немного истории
Автором асинхронного двигателя считают Михаила Осиповича Доливо-Добровольского, который в 1889 году получил патент на двигатель с ротором типа «Беличья клетка», а в 1890 году на двигатель с фазным ротором, которые без особых изменений в конструкции используются и сегодня. А первые исследования и наработки в этом направлении были проведены в 1888 Галилео Феррарисом и Николой Тесла независимо друг от друга.
Главным отличием разработки Доливо-Добровольского от разработок Теслы было использование трёхфазной, а не двухфазной конструкции статора. Демонстрация первых двигателей состоялась на Международной электротехнической выставке во Франкфурте на Майне в сентябре 1891 года. Там представили три трёхфазных асинхронных электродвигателя, самый мощный из которых был на 1.5 кВт. Конструкция этих машин оказалась настолько удачно, что не пережила весомых изменений до наших дней.
Определение асинхронной машины звучит следующим образом:
Асинхронной называется электрическая машина переменного тока, в которой частота вращения ротора не равна частоте вращения магнитного поля, создаваемого обмотками статора.
Трехфазный асинхронный двигатель с короткозамкнутым ротором
— это
асинхронный электродвигатель
, у которого ротор выполнен с короткозамкнутой обмоткой в виде беличьей клетки
[1]
.
Конструкция асинхронного электродвигателя
Трехфазный асинхронный электродвигатель, как и любой электродвигатель, состоит из двух основных частей — статора и ротора. Статор — неподвижная часть, ротор — вращающаяся часть. Ротор размещается внутри статора. Между ротором и статором имеется небольшое расстояние, называемое воздушным зазором, обычно 0,5-2 мм.
Статор состоит из корпуса и сердечника с обмоткой. Сердечник статора собирается из тонколистовой технической стали толщиной обычно 0,5 мм, покрытой изоляционным лаком. Шихтованная конструкция сердечника способствует значительному снижению вихревых токов, возникающих в процессе перемагничивания сердечника вращающимся магнитным полем. Обмотки статора располагаются в пазах сердечника.
Ротор состоит из сердечника с короткозамкнутой обмоткой и вала. Сердечник ротора тоже имеет шихтованную конструкцию. При этом листы ротора не покрыты лаком, так как ток имеет небольшую частоту и оксидной пленки достаточно для ограничения вихревых токов.
Принцип работы. Вращающееся магнитное поле
Принцип действия трехфазного асинхронного электродвигателя основан на способности трехфазной обмотки при включении ее в сеть трехфазного тока создавать вращающееся магнитное поле.
Вращающееся магнитное поле — это основная концепция электрических двигателей и генераторов.
Запустить

Остановить

Вращающееся магнитное поле асинхронного электродвигателя
Частота вращения этого поля, или синхронная частота вращения прямо пропорциональна частоте переменного тока f1 и обратно пропорциональна числу пар полюсов р трехфазной обмотки.
 ,
,
- где n1 – частота вращения магнитного поля статора, об/мин,
- f1 – частота переменного тока, Гц,
- p – число пар полюсов
Концепция вращающегося магнитного поля
Чтобы понять феномен вращающегося магнитного поля лучше, рассмотрим упрощенную трехфазную обмотку с тремя витками. Ток текущий по проводнику создает магнитное поле вокруг него. На рисунке ниже показано поле создаваемое трехфазным переменным током в конкретный момент времени
Запустить

Остановить

Магнитное поле прямого проводника с постоянным током
 Магнитное поле создаваемое обмоткой
Магнитное поле создаваемое обмоткой Составляющие переменного тока будут изменяться со временем, в результате чего будет изменяться создаваемое ими магнитное поле. При этом результирующее магнитное поле трехфазной обмотки будет принимать разную ориентацию, сохраняя при этом одинаковую амплитуду.
Запустить

Остановить

Вращающееся магнитное поле
Действие вращающегося магнитного поля на замкнутый виток
Теперь разместим замкнутый проводник внутри вращающегося магнитного поля. По закону электромагнитной индукции изменяющееся магнитное поле приведет к возникновению электродвижущей силы (ЭДС) в проводнике. В свою очередь ЭДС вызовет ток в проводнике. Таким образом, в магнитном поле будет находиться замкнутый проводник с током, на который согласно закону Ампера будет действовать сила, в результате чего контур начнет вращаться.
 Влияние вращающегося магнитного поля на замкнутый проводник с током
Влияние вращающегося магнитного поля на замкнутый проводник с током
Короткозамкнутый ротор асинхронного двигателя
По этому принципу также работает асинхронный электродвигатель. Вместо рамки с током внутри асинхронного двигателя находится короткозамкнутый ротор по конструкции напоминающий беличье колесо. Короткозамкнутый ротор состоит из стержней накоротко замкнутых с торцов кольцами.
 Короткозамкнутый ротор «беличья клетка» наиболее широко используемый в асинхронных электродвигателях (показан без вала и сердечника)
Короткозамкнутый ротор «беличья клетка» наиболее широко используемый в асинхронных электродвигателях (показан без вала и сердечника)
Трехфазный переменный ток, проходя по обмоткам статора, создает вращающееся магнитное поле. Таким образом, также как было описано ранее, в стержнях ротора будет индуцироваться ток, в результате чего ротор начнет вращаться. На рисунке ниже Вы можете заметить различие между индуцируемыми токами в стержнях. Это происходит из-за того что величина изменения магнитного поля отличается в разных парах стержней, из-за их разного расположения относительно поля. Изменение тока в стержнях будет изменяться со временем.
Запустить

Остановить

Вращающееся магнитное поле пронизывающее короткозамкнутый ротор
 Магнитный момент действующий на ротор
Магнитный момент действующий на ротор Вы также можете заметить, что стержни ротора наклонены относительно оси вращения. Это делается для того чтобы уменьшить высшие гармоники ЭДС и избавиться от пульсации момента. Если стержни были бы направлены вдоль оси вращения, то в них возникало бы пульсирующее магнитное поле из-за того, что магнитное сопротивление обмотки значительно выше магнитного сопротивления зубцов статора.
Скольжение асинхронного двигателя. Скорость вращения ротора
Отличительный признак асинхронного двигателя состоит в том, что частота вращения ротора n2 меньше синхронной частоты вращения магнитного поля статора n1.
Объясняется это тем, что ЭДС в стержнях обмотки ротора индуцируется только при неравенстве частот вращения n2<n1. Частота вращения поля статора относительно ротора определяется частотой скольжения ns=n1-n2. Отставание ротора от вращающегося поля статора характеризуется относительной величиной s, называемой скольжением:
 ,
,
- где s – скольжение асинхронного электродвигателя,
- n1 – частота вращения магнитного поля статора, об/мин,
- n2 – частота вращения ротора, об/мин,
Рассмотрим случай когда частота вращения ротора будет совпадать с частотой вращения магнитного поля статора. В таком случае относительное магнитное поле ротора будет постоянным, таким образом в стержнях ротора не будет создаваться ЭДС, а следовательно и ток. Это значит что сила действующая на ротор будет равна нулю. Таким образом ротор будет замедляться. После чего на стержни ротора опять будет действовать переменное магнитное поле, таким образом будет расти индуцируемый ток и сила. В реальности же ротор асинхронного электродвигателя никогда не достигнет скорости вращения магнитного поля статора. Ротор будет вращаться с некоторой скоростью которая немного меньше синхронной скорости.
Скольжение асинхронного двигателя может изменяться в диапазоне от 0 до 1, т. е. 0—100%. Если s~0, то это соответствует режиму холостого хода, когда ротор двигателя практически не испытывает противодействующего момента; если s=1 — режиму короткого замыкания, при котором ротор двигателя неподвижен (n2 = 0). Скольжение зависит от механической нагрузки на валу двигателя и с ее ростом увеличивается.
Скольжение, соответствующее номинальной нагрузке двигателя, называется номинальным скольжением. Для асинхронных двигателей малой и средней мощности номинальное скольжение изменяется в пределах от 8% до 2%.
Преобразование энергии
Асинхронный двигатель преобразует электрическую энергию подаваемую на обмотки статора, в механическую (вращение вала ротора). Но входная и выходная мощность не равны друг другу так как во время преобразования происходят потери энергии: на трение, нагрев, вихревые токи и потери на гистерезисе. Это энергия рассеивается как тепло. Поэтому асинхронный электродвигатель имеет вентилятор для охлаждения.
Варианты исполнений
IM 1081
на лапах, с одним концом вала

IM 1082
на лапах, с двумя свободными концами вала

IM 2081
на лапах и с большим фланцем (комбинированный), фланец доступный с обратной стороны («стандартный» фланец), с одним концом вала

IM 2082
на лапах и с большим фланцевым креплением (комбинированный), фланец доступный с обратной стороны («стандартный» фланец). Валы с обоих сторон.

IM 2181
на лапах и с малым фланцем (отверстия в корпусе двигателя), с одним концом вала

IM 2182
на лапах и с малым фланцем (отверстия в корпусе двигателя), с двумя валами

IM 3081
без лап, с большим фланцем, фланец доступный с обратной стороны («стандартный» фланец), с одним концом вала

IM 3082
без лап, с большим фланцем, фланец доступный с обратной стороны («стандартный» фланец), с двумя валами

IM 3681
без лап, малый фланец, с валом с одной стороны

IM 3682
без лап, малый фланец, два конца вала

Обратите внимание!
При введении стандарта МЭК 60034-7-2007 были изменены некоторые маркировки
- IM 3081 изменили на IM 3041
- IM 3082 изменили на IM 3042
- IM 3681 изменили на IM 3641
- IM 3682 изменили на IM 3642
Специальное исполнение
С — асинхронный электродвигатель с повышенным уровнем скольжения. Полная остановка ротора занимает продолжительное время
Р — с повышенным пусковым крутящим моментом. Для систем, требующих высоких мощностей в момент запуска
К — с фазным ротором
Е — со встроенным электромагнитным тормозным механизмом для обеспечения быстрой остановки ротора двигателя
Асинхронные трехфазные электродвигатели АИР
Среди разнообразия отечественных и импортных двигателей стоит отметить популярную марку АИР. В продаже насчитывается более 300 моделей с различными вариантами исполнений. Огромную популярность они приобрели благодаря высокой надежности, ремонтопригодности и низкой стоимости.
Где применяются электродвигатели:
- — для систем вентиляции
- — для печатных машин
- — для точильных и станков
- — для привода воздушных компрессоров
В этих сферах возможны применение как высокоскоростных моделей, так и малооборотистых (с частотой вращения менее 1000). Импортная продукция имеет маркировку rpm.
Моторы малой мощности популярны благодаря высокой энергоэффективности.
Подключение асинхронного двигателя
Трехфазный переменный ток
Электрическая сеть трехфазного переменного тока получила наиболее широкое распространение среди электрических систем передачи энергии. Главным преимуществом трехфазной системы по сравнению с однофазной и двухфазной системами является ее экономичность. В трехфазной цепи энергия передается по трем проводам, а токи текущие в разных проводах сдвинуты относительно друг друга по фазе на 120°, при этом синусоидальные ЭДС на разных фазах имеют одинаковую частоту и амплитуду.
 Трехфазный ток (разница фаз 120°)
Трехфазный ток (разница фаз 120°)
Звезда и треугольник
Трехфазная обмотка статора электродвигателя соединяется по схеме «звезда» или «треугольник» в зависимости от напряжения питания сети. Концы трехфазной обмотки могут быть: соединены внутри электродвигателя (из двигателя выходит три провода), выведены наружу (выходит шесть проводов), выведены в распределительную коробку (в коробку выходит шесть проводов, из коробки три).
Фазное напряжение — разница потенциалов между началом и концом одной фазы. Другое определение для соединения «звезда»: фазное напряжение это разница потенциалов между линейным проводом и нейтралью (обратите внимание, что у схемы «треугольник» отсутствует нейтраль).
Линейное напряжение — разность потенциалов между двумя линейными проводами (между фазами).
Внимание: Несмотря на то, что мощность для соединений в звезду и треугольник вычисляется по одной формуле, подключение одного и того же электродвигателя разным способом в одну и туже электрическую сеть приведет к потреблению разной мощности. При этом не правильное подключение электродвигателя, может привести к расплавлению обмоток статора.
Допустим электродвигатель был подключен по схеме «звезда» к трехфазной сети переменного тока U
л
=380 В (соответственно U
ф
=220 В) и потреблял ток I
л
=1 А. Полная потребляемая мощность:
S = 1,73∙380∙1 = 658 Вт.
Теперь изменим схему соединения на «треугольник», линейное напряжение останется таким же Uл=380 В, а фазовое напряжение увеличится в корень из 3 раз Uф=Uл=380 В. Увеличение фазового напряжения приведет к увеличению фазового тока в корень из 3 раз. Таким образом линейный ток схемы «треугольник» будет в три раза больше линейного тока схемы «звезда». А следовательно и потребляемая мощность будет в 3 раза больше:
S = 1,73∙380∙3 = 1975 Вт.
Таким образом, если двигатель рассчитан на подключение к трехфазной сети переменного тока по схеме «звезда», подключение данного электродвигателя по схеме «треугольник» может привести к его поломке.
Если в нормальном режиме электродвигатель подключен по схеме «треугольник», то для уменьшения пусковых токов на время пуска его можно соединить по схеме звезда. При этом вместе с пусковым током уменьшится также пусковой момент.
 Подключение электродвигателя по схеме звезда и треугольник
Подключение электродвигателя по схеме звезда и треугольник
Обозначение выводов статора трехфазного электродвигателя
Обозначение выводов обмоток статора
вновь разрабатываемых
трехфазных машин согласно
ГОСТ 26772-85 [2]
| Схема соединения обмоток, наименование фазы и вывода | Обозначение вывода | |
|---|---|---|
| Начало | Конец | |
| Открытая схема (число выводов 6) | ||
| первая фаза | U1 | U2 |
| вторая фаза | V1 | V2 |
| третья фаза | W1 | W2 |
| Соединение в звезду (число выводов 3 или 4) | ||
| первая фаза | U | |
| вторая фаза | V | |
| третья фаза | W | |
| точка звезды (нулевая точка) | N | |
| Соединение в треугольник (число выводов 3) | ||
| первый вывод | U | |
| второй вывод | V | |
| третий вывод | W |
Обозначение выводов обмоток статора ранее разработанных и модернизируемых трехфазных машин согласно ГОСТ 26772-85
| Схема соединения обмоток, наименование фазы и вывода | Обозначение вывода | |
|---|---|---|
| Начало | Конец | |
| Открытая схема (число выводов 6) | ||
| первая фаза | C1 | C4 |
| вторая фаза | C2 | C5 |
| третья фаза | C3 | C6 |
| Соединение звездой (число выводов 3 или 4) | ||
| первая фаза | C1 | |
| вторая фаза | C2 | |
| третья фаза | C3 | |
| нулевая точка | 0 | |
| Соединение треугольником (число выводов 3) | ||
| первый вывод | C1 | |
| второй вывод | C2 | |
| третий вывод | C3 |
Подключение трехфазного асинхронного двигателя к однофазной сети с помощью фазосдвигающего элемента
Трехфазные асинхронные электродвигатели могут быть подключены к однофазной сети с помощью фазосдвигаюших элементов. При этом электродвигатель будет работать либо в режиме однофазного двигателя с пусковой обмоткой (рисунок а, б, г) либо в режиме конденсаторного двигателя с постоянно включенным рабочим конденсатором (рисунок в, д, е).
 Схемы подключения трехфазного асинхронного электродвигателя к однофазной сети
Схемы подключения трехфазного асинхронного электродвигателя к однофазной сети
Схемы приведенные на рисунке «а», «б», «д» применяются, когда выведены все шесть концов обмотки. Электродвигатели с соединением обмоток согласно схемам «а», «б», «г» практически равноценны двигателям, которые спроектированы как однофазные электродвигатели с пусковой обмоткой. Номинальная мощность при этом состовляет 40-50% от мощности в трехфазном режиме, а при работе с рабочим конденсатором 75-80%.
Емкость рабочего конденсатора при частоте тока 50 Гц для схем «в», «д», «е» примерно рассчитывается соответственно по формулам:
- ,где Cраб — емкость рабочего конденсатора, мкФ,
- Iном – номинальный (фазный) ток статора трехфазного двигателя, А,
- U1 – напряжение однофазной сети, В.
Типовые значения оборотов асинхронных двигателей
Двухполюсные (2P- 2 полюса)
Стандартная частота вращения приводного вала составляет около трех тысяч оборотов в минуту (3000 об/мин). Двухполюсные двигатели еще называют высокоскоростными.
Четырехполюсные (4p- 4 полюса)
Скорость вращения вала около 1500 об/мин
Шестиполюсные (6P- 6 полюсов)
Типичная скорость вращения вала составляет 1000 об/мин
Восьмиполюсные (8P- 8 полюсов)
Частота вращения ротора двигателя находится около 750 об/мин
Двенадцатиполюсные (12P- 12 полюсов)
Малооборотистые двигатели со скоростью вращения вала 500 об/мин
Шеснадцатиполюсные (16P)
Малооборотистые двигатели со скоростью вращения вала 350 об
Ряд моторов способны работать на разных скоростях без применения фазорегулятора (многоскоростные моторы). Среди стандартных можно выделить следующие:
- Двухскоростные
- Трехскоростные
- Четырехскоростные
Преимущества и недостатки
Повсеместное использование асинхронных двигателей с короткозамкнутыми роторами обусловлено их неоспоримыми преимуществами:
- стабильностью работы на оптимальных нагрузках;
- высокой надёжностью в эксплуатации;
- низкие эксплуатационные затраты;
- долговечностью функционирования без обслуживания;
- сравнительно высокими показателями КПД;
- невысокой стоимостью, по сравнению с моделями на основе фазных роторов и с другими типами электромоторов.
Из недостатков можно отметить:
- высокие пусковые токи;
- чувствительность к перепадам напряжений;
- низкие коэффициенты скольжений;
- необходимость в применении устройств, таких как преобразователи частоты, пусковые реостаты и др., для улучшения характеристик электромотора;
- ЭД с короткозамкнутым ротором нуждаются в дополнительных коммутационных управляющих устройствах, в случаях, когда возникает необходимость регулировать скорость.
Электродвигатели данного типа имеют приличную механическую характеристику. Несмотря на недостатки, они лидируют по показателям их применения.
Управление асинхронным двигателем
- Способы подключения асинхронного электродвигателя к сети питания:
- прямое подключение к сети питания
- подключение от устройства плавного пуска
- подключение от преобразователя частоты
 Варианты подключения асинхронного электродвигателя с помощью магнитного пускателя (слева), устройства плавного пуска (посеридине) и частотного преобразователя (справа). Схемы представлены в упрощенном виде.
Варианты подключения асинхронного электродвигателя с помощью магнитного пускателя (слева), устройства плавного пуска (посеридине) и частотного преобразователя (справа). Схемы представлены в упрощенном виде.
FU1-FU9 — плавкие предохранители, KK1 — тепловое реле, KM1 — магнитный пускатель, L1-L3 — контакты для подключения к сети трехфазного переменного тока, M1-M3 — асинхронные электродвигатели, QF1-QF3 — автоматические выключатели, UZ1 — устройство плавного пуска, UZ2 — преобразователь частоты
Прямое подключение к сети питания
Использование магнитных пускателей позволяет управлять асинхронными электродвигателями путем непосредственного подключения двигателя к сети переменного тока.
С помощью магнитных пускателей можно реализовать схему:
- нереверсивного пуска: пуск и остановка;
- реверсивного пуска: пуск, остановка и реверс.
Использование теплового реле позволяет осуществить защиту электродвигателя от величин тока намного превышающих номинальное значение.
Нереверсивная схема
 Нереверсивная схема подключения трехфазного асинхронного электродвигателя к трехфазной сети переменного электрического тока через магнитный пускатель
Нереверсивная схема подключения трехфазного асинхронного электродвигателя к трехфазной сети переменного электрического тока через магнитный пускатель
L1, L2, L3 — контакты для подключения к сети трехфазного переменного тока, QF1 — автоматический выключатель, SB1 — кнопка остановки, SB2 — кнопка пуска, KM1 — магнитный пускатель, KK1 — тепловое реле, HL1 — сигнальная лампа, M — трехфазный асинхронный двигатель
Реверсивная схема
 Реверсивная схема подключения трехфазного асинхронного электродвигателя к трехфазной сети переменного электрического тока через магнитные пускатели
Реверсивная схема подключения трехфазного асинхронного электродвигателя к трехфазной сети переменного электрического тока через магнитные пускатели
L1, L2, L3 — контакты для подключения к сети трехфазного переменного тока, QF1 — автоматический выключатель, KM1, KM2 — магнитные пускатели, KK1 — тепловое реле, M — трехфазный асинхронный двигатель, SB1 — кнопка остановки, SB2 — кнопка пуска «вперед», SB3 — кнопка пуска «назад» (реверс), HL1, HL2 — сигнальные лампы
Недостатком прямой коммутации обмоток асинхронного электродвигателя с сетью является наличие больших пусковых токов, во время запуска электродвигателя.
Плавный пуск асинхронного электродвигателя
В задачах, где не требуется регулировка скорости электродвигателя во время работы для уменьшения пусковых токов используется устройство плавного пуска.
Устройство плавного пуска защищает асинхронный электродвигатель от повреждений вызванных резким увеличением потребляемой энергии во время пуска путем ограничения пусковых токов. Устройство плавного пуска позволяет обеспечить плавный разгон и торможение асинхронного электродвигателя.
Устройство плавного пуска дешевле и компактнее частотного преобразователе. Применяется там, где регулировка скорости вращения и момента требуется только при запуске.
Частотное управление асинхронным электродвигателем
Для регулирования скорости вращения и момента асинхронного двигателя используют частотный преобразователь. Принцип действия частотного преобразователя основан на изменении частоты и напряжения переменного тока.
- Использование частотного преобразователя позволяет:
- уменьшить энергопротребление электродвигателя;
- управлять скоростью вращения электродвигателя (плавный запуск и остановка, регулировка скорости во время работы);
- избежать перегрузок электродвигателя и тем самым увеличить его срок службы.
 Функциональная схема частотно-регулируемого привода
Функциональная схема частотно-регулируемого привода
- В зависимости от функционала частотные преобразователи реализуют следующие методы регулирования асинхронным электродвигателем:
- скалярное управление;
- векторное управление.
Скалярное управление является простым и дешевым в реализации, но имеет следующие недостатки — медленный отклик на изменение нагрузки и небольшой диапазон регулирования.Поэтому скалярное управление обычно используется в задачах, где нагрузка либо постоянна, либо изменяется по известному закону (например, управление вентиляторами).
 Скалярное управление асинхронным двигателем с датчиком скорости
Скалярное управление асинхронным двигателем с датчиком скорости
Векторное управление используется в задачах, где требуется независимо управлять скоростью и моментом электродвигателя (например, лифт), что, в частности, позволяет поддерживать постоянную скорость вращения при изменяющемся моменте нагрузки. При этом векторное управление является самым эффективным управлением с точки зрения КПД и увеличения времени работы электродвигателя.
Среди векторных методов управления асинхронными электродвигателями наиболее широкое применение получили: полеориентированное управление и прямое управление моментом.
 Полеориентированное управления асинхронным электродвигателем по датчику положения ротора
Полеориентированное управления асинхронным электродвигателем по датчику положения ротора
Полеориентированное управление позволяет плавно и точно управлять параметрами движения (скоростью и моментом), но при этом для его реализации требуется информация о направлениии вектора потокосцепления ротора двигателя.
- По способу получения информации о положении потокосцепления ротора электродвигателя выделяют:
- полеориентированное управление по датчику;
- полеориентированное управление без датчика: положение потокосцепления ротора вычисляется математически на основе той информации, которая имеется в частотном преобразователе (напряжение питания, напряжения и токи статора, сопротивление и индуктивность обмоток статора и ротора, количество пар полюсов двигателя).
 Полеориентированное управления асинхронным электродвигателем без датчика положения ротора
Полеориентированное управления асинхронным электродвигателем без датчика положения ротора
Прямое управление моментом имеет простую схему и высокую динамику работы, но при этом высокие пульсации момента и тока.
Где купить асинхронный двигатель?
В интернет магазине ТД “Мир строительного оборудования” всегда большой выбор асинхронных электродвигателей различного назначения. Мы является надежными поставщиками более 10 лет!
Мы продаем асинхронные двигателей только заводов, которые прошли регистрацию по стандарту ISO и производят двигатели по ГОСТу.
Интернет магазин ТД «Мсо» по продаже электродвигателей
Если вы знаете параметры вашего электромотора, то вы можете использовать фильтры для настройки поиска и ознакомится с представленными характеристиками товара.
Выбрав нужный электродвигатель, следуйте инструкция сайта и заполните контактную информацию для того, чтобы наши менеджеры с вами связались для подтверждения заказа.
Пункты самовывоза
Доставить нужный вам товар можно не только по адресу, но и в пункт самовывоза. Это актуально, если по времени вы ограничены.
ВНИМАНИЕ! Не все габариты электродвигателей доступны для заказа через пункты самовывоза. Эти ограничения справедливы для больших моторов.
Основные технические характеристики
В зависимости от класса электродвигателя, его технические характеристики меняются. В рамках данной статьи не ставится задача приведения параметров всех существующих классов двигателей. Мы остановимся на описании основных технических характеристик для электромоторов классов 56 А2 – 80 В2.
В этом небольшом промежутке на линейке моделей эелектромоторов с короткозамкнутыми роторами можно отметить следующее:
Мощность составляет от 0,18 кВт (класс 56 А2) до 2,2 кВт (класс 80 В2).
Ток при максимальном напряжении – от 0,55 А до 5А.
КПД от 66% до 83%.
Частота вращения вала для всех моделей из указанного промежутка составляет 3000 об./мин.
Технические характеристики конкретного двигателя указаны в его паспорте.
Трехфазный асинхронный двигатель с фазным ротором
—
асинхронный двигатель
, у которого обмотка ротора присоединена к контактным кольцам
[1]
.
До широкого распространения частотных преобразователей асинхронные двигатели средней и большой мощности делали с фазным ротором. Трехфазные асинхронные двигатели с фазным ротором (АДФР) обычно применяли в устройствах с тяжелыми условиями пуска, например в качестве крановых двигателей переменного тока, или же для привода устройств, требующих плавного регулирования частоты вращения.
Конструкция АДФР
Фазный ротор
Конструктивно фазный ротор представляет из себя трехфазную обмотку (аналогичную обмотки статора) уложенную в пазы сердечника фазного ротора. Концы фаз такой обмотки ротора обычно соединяются в «звезду», а начала подключают к контактным кольцам, изолированным друг от друга и от вала. Через щетки к контактным кольцам обычно присоединяется трехфазный пусковой или регулировочный реостат. Асинхронные двигатели с фазным ротором имеют более сложную конструкцию, чем у двигателей с короткозамкнутым ротором, однако обладают лучшими пусковыми и регулировочными свойствами.
 Фазный ротор
Фазный ротор
Статор АДФР
Статор асинхронного двигателя с фазным ротором по конструкции не отличается от статора асинхронного двигателя с короткозамкнутым ротором.
Обозначение выводов вторичных обмоток трехфазного АДФР
Обозначение выводов обмоток ротора
вновь разрабатываемых
трехфазных машин согласно
ГОСТ 26772-85 [2]
| Схема соединения обмоток, наименование фазы и вывода | Обозначение вывода | |
|---|---|---|
| Начало | Конец | |
| Открытая схема (число выводов 6) | ||
| первая фаза | K1 | K2 |
| вторая фаза | L1 | L2 |
| третья фаза | M1 | M2 |
| Соединение в звезду (число выводов 3 или 4) | ||
| первая фаза | K | |
| вторая фаза | L | |
| третья фаза | M | |
| точка звезды (нулевая точка) | Q | |
| Соединение в треугольник (число выводов 3) | ||
| первый вывод | K | |
| второй вывод | L | |
| третий вывод | M |
Обозначение выводов обмоток ротора ранее разработанных и модернизируемых трехфазных машин согласно ГОСТ 26772-85
| Схема соединения обмоток, наименование фазы и вывода | Обозначение вывода |
|---|---|
| Соединение звездой (число выводов 3 или 4) | |
| первая фаза | Р1 |
| вторая фаза | Р2 |
| третья фаза | Р3 |
| нулевая точка | 0 |
| Соединение треугольником (число выводов 3) | |
| первый вывод | Р1 |
| второй вывод | Р2 |
| третий вывод | Р3 |
Примечание: Контактные кольца роторов асинхронных двигателей обозначают так же, как присоединенные к ним выводы обмотки ротора, при этом расположение колец должно быть в порядке цифр, указанных в таблице, а кольцо 1 должно быть наиболее удаленным от обмотки ротора. Обозначение самих колец буквами необязательно.
Пуск АДФР

Пуск двигателей с фазным ротором производится с помощью пускового реостата в цепи ротора.
Применяются проволочные и жидкостные реостаты.
Металлические реостаты являются ступенчатыми, и переключение с одной ступени на другую осуществляется либо вручную с помощью рукоятки контроллера, существенным элементом которого является вал с укрепленными на нем контактами, либо же автоматически с помощью контакторов или контроллера с электрическим приводом.
Жидкостный реостат представляет собой сосуд с электролитом, в котором опущены электроды. Сопротивление реостата регулируется путем изменения глубины погружения электродов [3].
Для повышения КПД и снижения износа щеток некоторые АДФР содержат специальное устройство (короткозамкнутый механизм), которое после запуска поднимает щетки и замыкает кольца.
При реостатном пуске достигаются благоприятные пусковые характеристики, так как высокие значения моментов достигаются при невысоких значениях пусковых токов. В настоящее время АДФР заменяются комбинацией асинхронного электродвигателя с короткозамкнутым ротором и частотным преобразователем.
Смотрите также
Режимы работы

Электродвигатель асинхронного типа универсальный механизм и по продолжительности работы имеет несколько режимов:
- Продолжительный;
- Кратковременный;
- Периодический;
- Повторно-кратковременный;
- Особый.
Продолжительный режим — основной режим работы асинхронных устройств, который характеризуется постоянной работой электродвигателя без отключений с неизменной нагрузкой. Такой режим работы самый распространенный, используется на промышленных предприятиях повсеместно.
Кратковременный режим – работает до достижения постоянной нагрузки определенное время (от 10 до 90 минут), не успевая максимально разогреться. После этого отключается. Такой режим используют при подаче рабочих веществ (воду, нефть, газ) и прочих ситуациях.
Периодический режим – продолжительность работы имеет определенное значение и по завершении цикла работ отключается. Режим работы пуск-работа-остановка. При этом он может отключаться на время, за которое не успевает остыть до внешних температур и включаться заново.
Повторно-кратковременный режим – двигатель не нагревается максимально, но и не успевает остыть до внешней температуры. Применяется в лифтах, эскалаторах и прочих устройствах.
Особый режим – продолжительность и период включения произвольный.
В электротехнике существует принцип обратимости электрических машин — это означает, что устройство может, как преобразовывать электрическую энергию в механическую, так и совершать обратные действия.
Асинхронные электродвигатели тоже соответствуют этому принципу и имеют двигательный и генераторный режим работы.
Двигательный режим – основной режим работы асинхронного электродвигателя. При подаче напряжения на обмотки возникает электромагнитный вращающий момент, увлекающий за собой ротор с валом и, таким образом, вал начинает вращаться, двигатель выходит на постоянную частоту вращения, совершая полезную работу.
Генераторный режим – основан на принципе возбуждения электрического тока в обмотках двигателя при вращении ротора. Если вращать ротор двигателя механическим способом, то на обмотках статора образуется электродвижущая сила, при наличии конденсатора в обмотках возникает емкостный ток. Если емкость конденсатора будет определенного значения, зависящего от характеристик двигателя, то произойдет самовозбуждение генератора и возникнет трехфазная система напряжений. Таким образом короткозамкнутый электродвигатель будет работать как генератор.
Способы торможения двигателей
При торможении противовключением меняются два провода соединяющих трехфазную сеть с обмотками статора, изменяя при этом направление движения магнитного поля машины. При этом наступает режим электромагнитного тормоза. Для динамического торможения обмотка статора отключается от трехфазной сети и включается в сеть постоянного тока. Неподвижное поле статора заставляет ротор быстро останавливаться.
Для лучшего понимания механизмов торможения двигателей рекомендуем также подробнее прочитать все что нужно знать о шаговых электродвигателях.
После отключения от сети электродвигатель продолжает движение по инерции. При этом кинетическая энергия расходуется на преодоление всех видов сопротивлений движению. Поэтому скорость электродвигателя через промежуток времени, в течение которого будет израсходована вся кинетическая энергия, становится равной нулю.
Такая остановка электродвигателя при движении по инерции называется свободным выбегом. Многие электродвигатели, работающие в продолжительном режиме или со значительными нагрузками, останавливают путем свободного выбега.
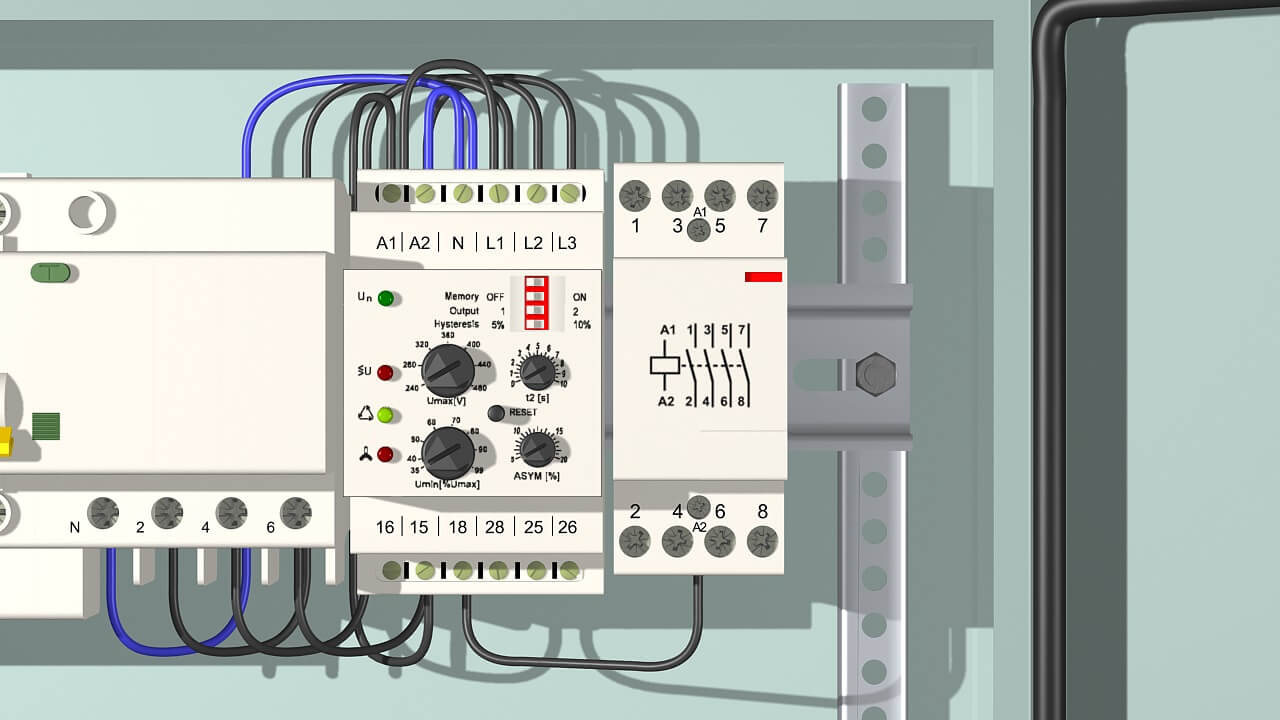
Для защиты двигателя применяют реле контроля напряжения.

Для защиты двигателей от пропадания и перекоса (разницы напряжений) фаз питающего напряжения применяют реле контроля фаз, которые в этих случаях полностью отключают питание (с автоматическим или ручным дальнейшим включением). Возможна установка одного реле на группу двигателей.
Более грубой и универсальной защитой, обязательной по правилам эксплуатации и обычно достаточной при правильно подобранных параметрах, является установка трёхфазных автоматических выключателей (по одному на двигатель), которые отключают питание в случае длительного (до несколько минут) превышения номинального тока по любой из фаз, что является следствием перегрузки двигателя, перекоса или обрыва фаз.


