SQLITE NOT INSTALLED
Как рассчитать ток холостого хода асинхронного двигателя Подписка на рассылку Электродвигатель переходит в режим холостого хода, когда с его вала снимают
Подписка на рассылку
Электродвигатель переходит в режим холостого хода, когда с его вала снимают рабочую нагрузку. В этом случае можно определить такие важные параметры функционирования устройства, как намагничивающий ток, мощность и коэффициент потерь в элементах конструкции привода. Но главное – в режиме холостого хода можно определить исправность устройства.
Так, электродвигатель на холостом ходу греться не должен. Но в некоторых случаях температура привода повышается – и это сигнализирует о неполадках, которые впоследствии могут проявить себя.
Параметры холостого хода электродвигателя
Как было сказано выше, холостой ход – это режим работы асинхронного электродвигателя, при котором на валу нет нагрузки. В этом случае устройство с точки зрения электротехники схоже с трансформатором. Но главное – оно потребляет меньше электроэнергии, что особенно важно для контроля правильности работы мотора.
В частности, ток холостого хода асинхронного электродвигателя в зависимости от мощности и частоты вращения составляет в среднем 20-90% от номинального. Существует таблица, в которой указаны данные значения.
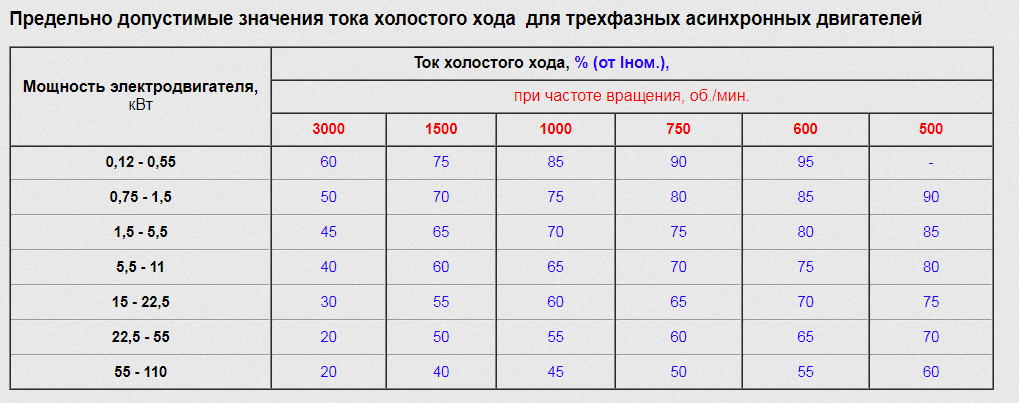
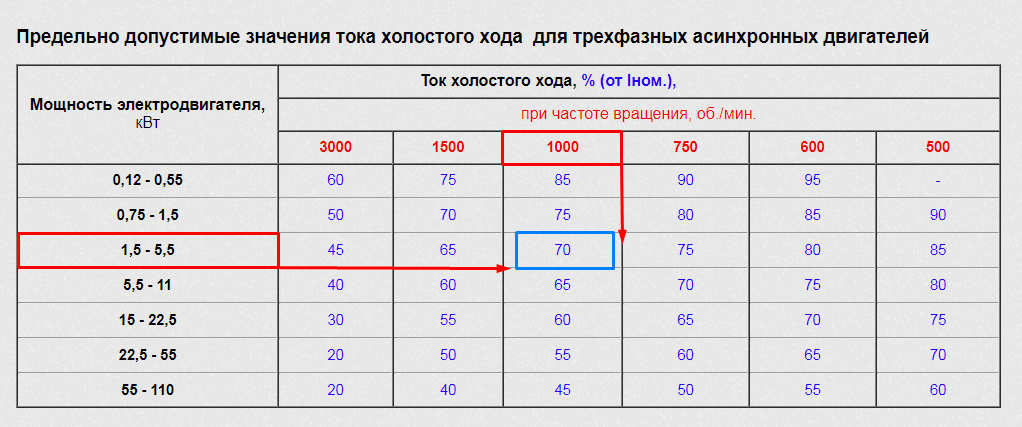
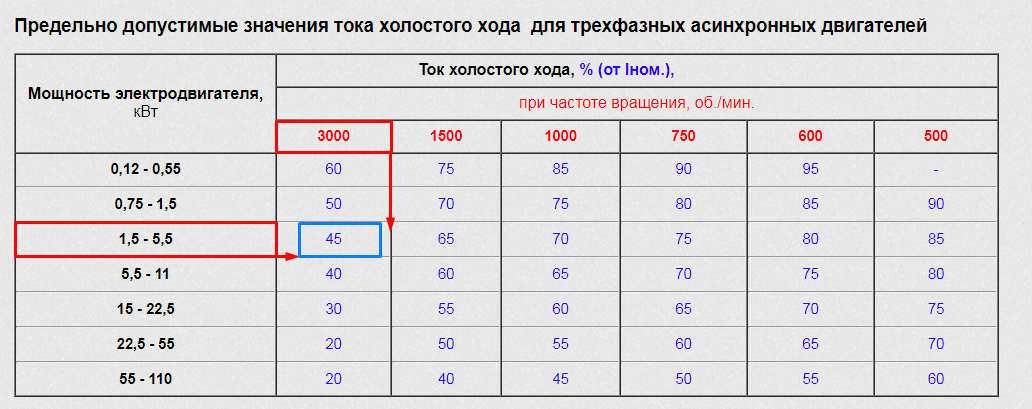
Так, например, ток холостого хода электродвигателя на 5 кВт при частоте вращения в 1000 оборотов в минуту составляет 70% от номинального (см. рис. 2). При частоте вращения 3000 оборотов в минуту – всего 45% от номинального (см. рис. 3). Это важно учесть, так как если фактическая сила тока значительно расходится с расчётной, то это сигнализирует о неполадках.
Стоит отметить, что параметры работы двигателя обычно указаны в прилагаемой к нему документации или могут быть получены посредством расчётов.
Что делать, если греется электродвигатель на холостом ходу
Электродвигатель на холостом ходу греться не должен. Допускается лишь незначительное увеличение температуры, обусловленное естественными причинами – появление трения в подшипниках на валу ротора и сопротивление в обмотке. А вот заметный нагрев сигнализирует в первую очередь о неполадках в устройстве.
Чаще всего нагревается асинхронный электродвигатель на холостом ходу из-за межвиткового замыкания в обмотках. Это требует срочного ремонта. Ведь при повышении нагрузок межвитковое замыкание может привести к перегреву и выгоранию обмотки – и, как следствие, повреждению как самого ЭД, так и конструкции, в которую он установлен.
Ещё одна возможная причина нагрева ЭД в этом режиме – эксплуатация в нештатных условиях. Например, превышение напряжения. В этом случае необходимо срочно отключить питание двигателя, так как из-за перегрева может возникнуть межвитковое замыкание в обмотках или замыкание обмотки на корпус двигателя.
Реже нагрев ЭД наблюдается из-за затруднённого движения ротора. Стоит убедиться, что подшипники работают нормально, а между обмотками ротора и статора не попали загрязнения.
Коэффициент мощности при холостом ходе электродвигателя
- Режим холостого хода в асинхронном электродвигателе возникает в момент отсутствия нагрузки в форме редуктора или рабочего момента. При этом режим s=0 недостижим даже при условии, что трение в подшипниках не создаст момент нагрузки. Но если поле статора не пересекает непосредственно поле обмотки ротора и не индуцирует в нем ток, значит, не создается электромагнитное поле ротора.
- Как правило, коэффициент мощности асинхронного электродвигателя в режиме холостого хода не превышает предельно допустимых параметров, равных 0,2. Если увеличить нагрузку на вал электродвигателя, коэффициент мощности возрастет и достигнет наибольшего значения. Такой коэффициент создается при номинальной нагрузке.
- Дальнейшее же увеличение нагрузки приводит к индуктивному сопротивлению ротора, так как увеличивается скольжение и как следствие – частота тока в роторе. Чтобы увеличить коэффициент мощности, следует обеспечить электродвигателю нагрузку, параметры которой наиболее близки к номинальным значениям. Следовательно – необходимо правильно выбрать мощность самого электродвигателя.
- При систематической работе недогруженного электродвигателя подводимое к мотору напряжение пропорционально уменьшают. Сделать это вполне реально, переключив обмотку статора с треугольника на звезду. Такой способ подключения поможет уменьшить фазное напряжение в один раз. Активная же составляющая тока статора пропорционально увеличится. Коэффициент мощности также будет увеличен.
1. Виды электродвигателей
Наибольшее распространение имеет трехфазный асинхронный электродвигатель. Электродвигатели постоянного тока и синхронные применяются редко.
Большинство электрифицированных машин нуждаются в приводе мощностью от 0,1 до 10 кВт, значительно меньшая часть — в приводе мощностью в несколько десятков кВт. Как правило, для привода рабочих машин используются короткозамкнутые трехфазные электродвигатели. По сравнению с фазным такой электродвигатель имеет более простую конструкцию, меньшую стоимость, большую надежность в эксплуатации и простоту в обслуживании, несколько более высокие эксплутационные показатели (коэффициент мощности и коэффициент полезного действия), а при автоматическом управлении требует простой аппаратуры. Недостаток короткозамкнутых электродвигателей — относительно большой пусковой ток. При соизмеримости мощностей трансформаторной подстанции и электродвигателя его пуск сопровождается заметным снижением напряжения сети, что усложняет как пуск самого двигателя, так и работу соседних токоприемников.
Наряду с трехфазными асинхронными короткозамкнутыми электродвигателями основного исполнения применяются также отдельные модификации этих двигателей: с повышенным скольжением, многоскоростные, с фазным ротором, с массивным ротором и т. д. Электродвигатели с фазным ротором применяют и в тех случаях, когда мощность питающей сети недостаточна для пуска двигателя с короткозамкнутым ротором.
Механические характеристики асинхронных электродвигателей с короткозамкнутым ротором в значительной мере зависят от формы и размеров пазов ротора, а также от способа выполнения роторной обмотки. По этим признакам
 асинхронных электродвигателей")
Рис. 1. Кривые моментов M = f(S) асинхронных электродвигателей
различают электродвигатели с нормальным ротором (нормальная беличья клетка), с глубоким пазом и с двумя клетками на роторе. Конструкция ротора короткозамкнутых асинхронных электродвигателей общего назначения мощностью свыше 500 Вт предопределяет явление вытеснения тока в обмотке, эквивалентно увеличению ее активного сопротивления. Поэтому, а также вследствие насыщения магнитных путей потоков рассеивания такие электродвигатели (в первую очередь обмотки ротора) обладают переменными параметрами и аналитические выражения их механических характеристик усложняются. Увеличение активного сопротивления ротора в период пуска вызывает увеличение начального пускового момента при некотором снижении силы начального пускового тока (рис. 1).
Для схемы соединения обмоток «звездой» определяем номинальные фазные напряжения и фазные (которые являются также и линейными) токи.
Фазное напряжение:

Приведённая мощность:


Добавочные потери определяем по формуле:

Фазный ток обмоток статора:

Заданные относительные сопротивления переводим в омические.
Коэффициент перевода электрических параметров из относительных единиц в именованные:

Найдём найденное сопротивление в именованных единицах. Определим активное сопротивление цепи намагничивания потери в стали:

Индуктивное сопротивление взаимоиндукции приведённой первичной и вторичной цепи:

Активное сопротивление обмотки статора в именованных единицах:

Индуктивное сопротивление обмотки статора в именованных единицах:

Активное приведённое сопротивление обмотки ротора в именованных единицах:

Определим индуктивное приведённое сопротивление обмотки ротора:

Определяем токи холостого хода ротора и статора.
Полное активное сопротивление рабочего контура:

Определим полное индуктивное сопротивление рабочего контура:

Таким образом полное эквивалентное сопротивление контура намагничивания определяем по формуле:

Определим 
Определим 
Определим действующее значение тока холостого хода статора:

Определим активную составляющую тока холостого хода:

Определим реактивную составляющую тока холостого хода:

Для заданной схемы определим поправочный коэффициент:

Для различных значений S рассчитываем:
1. Токистатора I1a, I1p, I1
2. Токиротора I2a, I2p, I2
3. Коэффициент мощности cosj
4. Потребляемую мощность Р1
5. Полезную мощность Р2
6. Преобразованную мощность Рпр
7. Коэффициент полезного действия h
8. Угловую скорость n
9. Момент нагрузки на валу двигателя М2
Определим приведённое активное сопротивление обмотки статора по формуле:

Определим эквивалентное активное сопротивление рабочего контура:

Приведённое индуктивное сопротивление рабочего контура:

Полное приведённое сопротивление рабочего контура:

Определим коэффициент мощности при S=0,0025

Действующее значение тока ротора:

Активная составляющая тока ротора

Определим реактивную составляющую тока ротора:

Определим активную составляющую тока статора:

Реактивная составляющая тока статора:

Определим действующее значение тока статора:


Определяем добавочное приведённое активное сопротивление в цепи ротора:

Определяем полезную мощность на валу двигателя

где: 
Определяем угловую скорость магнитного поля статора:

Определяем угловую скорость магнитного поля машины:

Определяем момент нагрузки на валу двигателя:

Определяем потребляемую мощность машины:

Определим приведённое индуктивное сопротивление рабочего контура:

Выполняем расчеты при S= 0,0025; 0,005; 0,01; 0,02; 0,025; 0,03; 0,2; 0,3, результаты сводим в таблицу 3П (Расчет выполнен на компьютере с использованием программы Excel)
Таблица 1
| № п/п | Значение | Значение S | |||||||
| 0,0025 | 0,005 | 0,01 | 0,02 | 0,025 | 0,03 | 0,2 | 0,3 | ||
| 1 | R’2 | 100,1348 | 50,0674 | 25,0337 | 12,5168 | 10,01348 | 8,3446 | 1,251685 | 0,834456 |
| 2 | R»2 | 100,4649 | 50,3975 | 25,3639 | 12,8470 | 10,34364 | 8,6747 | 1,581843 | 1,164615 |
| 3 | Rпр | 99,8844 | 49,8170 | 24,7834 | 12,2665 | 9,76314 | 8,0942 | 1,001348 | 0,584119 |
| 4 | Z»2 | 100,5022 | 50,4719 | 25,5112 | 13,1355 | 10,69983 | 9,0965 | 3,161932 | 2,975217 |
| 5 | cos«2 | 0,9996 | 0,9985 | 0,9942 | 0,9780 | 0,96671 | 0,9536 | 0,500277 | 0,391439 |
| 6 | I»2 | 3,7915 | 7,5498 | 14,9366 | 29,0093 | 35,61282 | 41,8898 | 120,5121 | 128,0751 |
| 7 | I»2a | 3,7901 | 7,5387 | 14,8504 | 28,3722 | 34,42728 | 39,9475 | 60,28948 | 50,13354 |
| 8 | I»2r | 0,1033 | 0,4095 | 1,6030 | 6,0464 | 9,112391 | 12,6077 | 104,3473 | 117,8552 |
| 9 | I1a | 5,2979 | 9,0465 | 16,3582 | 29,8800 | 35,9352 | 41,4554 | 61,7974 | 51,6414 |
| 10 | I1r | 16,0652 | 16,3715 | 17,5649 | 22,0083 | 25,0743 | 28,5697 | 120,3092 | 133,8172 |
| 11 | I1 | 16,9162 | 18,7047 | 24,0024 | 37,1104 | 43,81845 | 50,3465 | 135,2524 | 143,4359 |
| 12 | cos 1 | 0,3132 | 0,4837 | 0,6815 | 0,8052 | 0,820092 | 0,8234 | 0,456904 | 0,360031 |
| 13 | Рпр | 4307,59 | 8518,58 | 16587,72 | 30968,22 | 37146,98 | 42610,26 | 43628,23 | 28744,33 |
| 14 | Рдоб | 7,15 | 8,75 | 14,40 | 34,43 | 48,00141 | 63,37 | 457,3303 | 514,3466 |
| 15 | P2 | 3930,44 | 8139,84 | 16203,32 | 30563,79 | 36728,98 | 42176,89 | 42800,9 | 27859,99 |
| 16 | W1 | 104,667 | |||||||
| 17 | W | 104,405 | 104,143 | 103,620 | 102,573 | 102,050 | 101,5267 | 83,73333 | 73,26667 |
| 18 | М2 | 37,65 | 78,16 | 156,37 | 297,97 | 359,91 | 415,4267 | 511,1573 | 380,2546 |
| 19 | Р1 | 6056,36 | 10341,58 | 18699,98 | 34157,48 | 41079,40 | 47389,88 | 70643,87 | 59034,06 |
| 20 | h | 0,6490 | 0,7871 | 0,8665 | 0,8948 | 0,8941 | 0,889998 | 0,605869 | 0,471931 |
| 21 | n | 997,5 | 995 | 990 | 980 | 975 | 970 | 800 | 700 |
По данным таблицы 1 строим рабочие характеристики асинхронного двигателя, требуемых зависимостей.

Рисунок 1(а). График рабочих характеристик асинхронного двигателя

Рисунок 2(б). График рабочих характеристик асинхронного двигателя
По построенным графикам рабочих характеристик определяем расчётные номинальные значения М2н, зн, cosц1н, соответствующие заданному номинальному значению мощности P2н= 30кВт и сравниваем их со значением в таблице исходных данных 1.
М2н= 303,28 Нм; зн=89,4; cosц1н=0,817;
 ;
; 
Погрешность расчета для всех параметров не превышает 5%.
Определяем критическое скольжение:

Так как расчет выполняем для двигателя, то в формуле стоит +.
Определяем максимальный момент:

Определяем пусковой момент

b =r/(C*r)
Кратности пускового Мп и максимального Mmax, составляют:


Пользуясь формулой Клосса определяем электромагнитный момент для заданных значений скольжений S= (0,1…. 1,0).

Подставив в формулу различные значения S, проведём вычисления, результаты которых сведём в таблицу 2.
Таблица 2
| 0 | 0,091 | 0,1 | 0,3 | 0,5 | 0,7 | 1 |
| 0 | 752,56 | 749,64 | 439,32 | 285,17 | 209,28 | 149,06 |
По данным таблицы №2 строим механическую характеристику асинхронного двигателя.

Рисунок 2. График механических характеристик асинхронного двигателя (зависимость момента М от скольжения S
Заключение
Диапазон рабочих характеристик асинхронного двигателя соответствует его зоне устойчивой работы: 
Эта характеристика позволяет находить все основные величины, которые определяют режим работы двигателя при различных нагрузках. Их можно получить либо расчётным путём по схеме замещения, либо экспериментально.
Максимальный момент двигателя называют опрокидывающим моментом. При работе двигателя с величинами момента нагрузки, меньше максимального момента, но близкими к нему, случайная перегрузка двигателя приводит к его остановке и к как правилу к выходу его из строя.
По этой причине практически выбирают двигатель такой мощности, при которой выполняется неравенство:  , при этом обеспечивается мощность двигателя с запасом по мощности не менее 70%. При проведенных расчётах мы видим, что мощность двигателя, заданного в условии задачи соответствует этим условиям:Таким образом, выполняется главное условие выбора асинхронного двигателя, так как запас по мощности данного двигателя более чем 100%. Погрешность расчета для вех параметров не превышает 5%.
, при этом обеспечивается мощность двигателя с запасом по мощности не менее 70%. При проведенных расчётах мы видим, что мощность двигателя, заданного в условии задачи соответствует этим условиям:Таким образом, выполняется главное условие выбора асинхронного двигателя, так как запас по мощности данного двигателя более чем 100%. Погрешность расчета для вех параметров не превышает 5%.
трехфазный асинхронный двигатель рабочий
Список литературы
1. Брускин Д.Э., Зорохович А.Е., Хвостов В.С. «Электрические машины», Москва «Высшая школа», 1987 г.;
2. Винокуров В.А., Попов Д.А. «Электрические машины железнодорожного транспорта», Москва «Транспорт», 1986 г.;
3. Копылов И.П. «Электрические машины», Москва «Энергоатомиздат», 1986 г.;
4. Попов Д.А., Руднев В.Н. «Электрические машины» задание на контрольную работу с методическими указаниями, Москва, 1991 г.
Ток – холостой ход – асинхронный двигатель
Ток холостого хода асинхронных двигателей достигает 20 – 40 % от номинального тока статора ( / 0 0 2 – 0 4 / IH), между тем как у трансформаторов ток / 0 составляет всего 2 5 – 10 % от / IH. Повышенное значение тока холостого хода асинхронной машины обуслоь-лено наличием воздушного зазора между статором и ротором. [1]
Ток холостого хода асинхронных двигателей достигает 20 – 40 % от номинального тока статора ( / 0 2 – 0 4 / IH), между тем как у трансформаторов ток / 0 составляет всего 2 5 – 10 % от / IH. Повышенное значение тока холостого хода асинхронной машины обусловлено наличием воздушного зазора между статором и ротором. [2]
Почему ток холостого хода асинхронного двигателя составляет 25 – 50 %, а у трансформатора 3 – 10 % от номинального тока. [3]
Почему ток холостого хода асинхронного двигателя составляет 25 – 50 %, а трансформатора – 3 – 10 % от номинального тока. [4]
Для определения активной составляющей тока холостого хода асинхронного двигателя необходимо предварительно вычислить: вес активной стали статора и магнитные потери в нем-для трехфазного асинхронного двигателя; вес стали статора и ротора и потери в них – для однофазного двигателя с беличьей клеткой и малоинерционного асинхронного двигателя с немагнитным полым ротором. [5]
Для определения активной составляющей тока холостого хода асинхронного двигателя необходимо предварительно вычислить: массу активной стали статора и магнитные потери в нем – для трехфазного асинхронного двигателя; массу стали статора и ротора и потери в них – для однофазного двигателя с беличьей клеткой и малоинерционного асинхронного двигателя с немагнитным полым ротором. [6]
Из-за большого магнитного сопротивления цепи с двумя воздушными зазорами ток холостого хода асинхронного двигателя значителен и является в основном реактивным током. [7]
Сопротивления Rm и Хт намагничивающего контура значительно меньше соответствующих значений для схемы замещения трансформатора, так как ток холостого хода асинхронного двигателя гораздо больше, чем у трансформатора. Если при рассмотрении работы трансформатора часто можно пренебречь намагничивающим контуром, то при рассмотрении работы асинхронного двигателя этого сделать нельзя, так как ошибка может получиться значительной. [8]
При повышении частоты и номинальном напряжении ток холостого хода и магнитный поток уменьшаются, а следовательно, снижается и вращающий момент. На рисунке 249 приведен график зависимости тока холостого хода асинхронного двигателя от частоты, который показывает, что уменьшение частоты влечет за собой резкое увеличение тока холостого хода. [10]
Ток холостого хода двигателя и потребляемая им реактивная мощность значительно возрастают в случае работы от сети с напряжением выше номинального. Поэтому во время эксплуатации необходимо следить за напряжением цеховых сетей и не допускать отклонения его от номинального. Величина тока холостого хода асинхронного двигателя возрастает также вследствие низкого качества ремонтных работ: неправильное соединение секций обмоток, изменение при перемотке обмоточных данных по сравнению с паспортными и увеличение величины воздушного зазора. [11]
 Привет посетители сайта fazanet.ru, и в сегодняшней статье мы с вами разберём, как же сделать, этот непонятный расчёт тока электродвигателя. Каждый уважающий себя электромонтёр, робота которого связана с обслуживанием электрических, машин просто обязан это знать. Я в своё время тоже помню, что меня это очень сильно интересовало, когда меня перевили с одного цеха в другой. А конкретно именно работать электромонтёром.
Привет посетители сайта fazanet.ru, и в сегодняшней статье мы с вами разберём, как же сделать, этот непонятный расчёт тока электродвигателя. Каждый уважающий себя электромонтёр, робота которого связана с обслуживанием электрических, машин просто обязан это знать. Я в своё время тоже помню, что меня это очень сильно интересовало, когда меня перевили с одного цеха в другой. А конкретно именно работать электромонтёром.
Перед этим я уже немного затрагивал темы электродвигателей, когда писал о том как запустить асинхронные двигателей, и когда писал какие бывают номиналы электродвигателей.
Ну а теперь приступим конкретно к самому расчёту. Допустим: у вас есть трёхфазный асинхронный электродвигателей переменного тока, номинальная мощность, которого составляет 25 кВт, и вам хочется узнать какой же у него будет номинальный ток.
Для этого существует специальная формула: Iн = 1000Pн /√3•(ηн • Uн • cosφн),
Где Pн – это мощность электродвигателя; измеряется в кВт
Uн – это напряжение, при котором работает электродвигатель; В
ηн – это коэффициент полезного действия, обычно это значение 0.9
ну и cosφн – это коэффициент мощности двигателя, обычно 0.8.
Последние два значения обычно пишутся на заводской бирке, хотя они у всех двигателей практически одинаковые. Но все же нужно брать данные именно с заводской бирки на двигателе.

Вот как на этой картинке все значения видны, а ток нет. Только если КПД написан 81%, то для расчёта нужно брать 0.81.
Теперь подставим значения Iн = 1000•25/√3 • (0.9 • 380 • 0.8) = 52.81 А
Тем, кто не помнит, сколько будет √3, напоминаю – это будет 1,732
Вот и всё, все расчёты закончены. Всё очень легко и просто. По моему образцу вы можете легко рассчитать номинальный ток электродвигателя, вам всего лишь нужно подставить своих данных.
Как определить ток электродвигателя на практике.
Ещё в заключении, хотел поделиться с вами, тем как я определяю приблизительное значение тока без всяких расчётов. Если реально посмотреть, что у нас с вами получилось при расчёте, то реально вид, что номинальный ток приблизительно в два раза больше чем его мощность. Вот так я определяю ток на практике, мощность умножаю на два. Но это только приблизительное значение.
А ток холостого хода будет обычно в два раза меньше, чем его мощность. Но про то, как определить эти значения, мы поговорим с вами в следующих статьях. Так что подписывайтесь на обновления и не забываете поделиться этой статьёй со своими друзьями в социальных сетях.
Источник
Почему так важно при покупке электродвигателя получить профессиональную рекомендацию специалиста
Неправильно выбранная мощность электродвигателя не позволит решить все поставленные задачи. При неполной загруженности электромотора вы будете иметь дополнительные расходы на его техническое обслуживание и ремонт. При недостатке мощности электродвигатель быстро выйдет из строя.
При покупке электродвигателя в нашей компании Вы получите профессиональную рекомендацию специалиста по подбору электродвигателя нужной модели и нужной мощности.
Просмотров: 12579
Дата: Воскресенье, 15 Декабрь 2013
2. Основные характеристики электродвигателей
Номинальный режим электродвигателя соответствует данным, указанным на его щитке (паспорте). В этом режиме двигатель должен удовлетворять требованиям, установленным ГОСТом.
Существует восемь различных режимов работы, из них основными можно считать:
· продолжительный номинальный режим;
· кратковременный номинальный режим с длительностью рабочего периода 10, 30 и 90 мин;
· повторно-кратковременный номинальный режим с продолжительностью включения (ПВ) 15, 25, 40, 60%, с продолжительностью одного цикла не более 10 мин.
Номинальной мощностью Рн электродвигателя называется указанная на щитке полезная механическая мощность на валу при номинальном режиме работы. Номинальная мощность выражается в Вт или кВт.
Номинальная частота вращения nн вала электродвигателя называется указанное на щитке число оборотов в минуту, соответствующее номинальному режиму.
Номинальный момент вращения — момент, развиваемый двигателем на валу при номинальной мощности и номинальной частоте вращения:
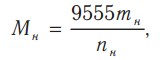
где:
Мн — номинальный момент вращения, Н·м (1 кгс·м = 9,81 Н·м ≈ 10 Н·м);
Рн — номинальная мощность, кВт;
nн — номинальная частота вращения, об/мин.
Номинальный к.п.д. hн электродвигателя — отношение его номинальной
мощности к мощности, потребляемой им из сети при номинальном напряжении:
где:
Рн — номинальная мощность, кВт;
Uн — номинальное (линейное) напряжение, В;
Iн — номинальная сила тока, А;
cosφн — номинальный коэффициент мощности.
Номинальной силой тока электродвигателя называется сила тока, соответствующая номинальному режиму. Действительное значение силы тока при номинальном режиме может отличаться от указанного на щитке электродвигателя в пределах установленных допусков для к.п.д. и коэффициента мощности.
Максимальный вращающий момент электродвигателя — наибольший вращающий момент, развиваемый при рабочем соединении обмоток и постепенном повышении момента сопротивления на валу сверх номинального при условии, что напряжение на зажимах двигателя и частота переменного тока остаются неизменными и равными номинальным значениям.
Начальный пусковой вращающий момент электродвигателя — момент вращения его при неподвижном роторе, номинальных значениях напряжения и частоты переменного тока и рабочем соединении обмоток.
Минимальным вращающим моментом электродвигателя в процессе пуска называется наименьший вращающий момент, развиваемый двигателем при рабочем соединении обмоток и частоте вращения в пределах от нуля до значения, соответствующего максимальному вращающему моменту (напряжение на зажимах двигателя и частота переменного тока должны оставаться неизменными и равными их номинальным значениям).
Номинальная частота вращения вала электродвигателя является следующим за мощностью параметром, от которого в значительной мере зависят конструктивное оформление, габариты, стоимость и экономичность работы электропривода. Наиболее приемлемыми в диапазоне мощностей от 0,6 до 100 кВт являются частоты вращения 3000, 1500 и 1000 об/мин (синхронные). Электродвигатели с частотой вращения 750 об/мин (восьмиполюсные) малых мощностей имеют низкие энергетические показатели. При одинаковой мощности электродвигатели с более высокой частотой вращения имеют более высокие значения к.п.д. и cosφ, а также меньшие размеры и массу, что определяет их меньшую стоимость.
Сила тока холостого хода I0 в значительной мере определяется силой намагничивающего тока I0Р. приближенно можно считать I0 = I0P . Для машин
основного исполнения относительное значение силы тока холостого хода
I0 = (0,2—0,6)Iн (оно тем больше, чем меньше номинальная частота вращения и мощность электродвигателя). Зависимость тока холостого хода от частоты вращения электродвигателя приведена в таблице 2.1.
Таблица 2.1. Токи холостого хода для двигателей основного исполнения
|
Мощность, кВт |
Среднее значение токов холостого хода (в долях от силы номинального тока) при синхронной частоте вращения, об/мин |
||||
|
3000 |
1500 |
1000 |
750 |
600 |
|
|
0,5—1 |
0,4 |
0,55 |
0,6 |
— |
— |
|
1,1—5 |
0,35 |
0,5 |
0,55 |
0,6 |
— |
|
5,1—10 |
0,25 |
0,45 |
0,5 |
0,55 |
0,6 |
|
10,1—25 |
0,2 |
0,4 |
0,45 |
0,5 |
0,55 |
|
25,1—50 |
0,18 |
0,35 |
0,4 |
0,45 |
0,5 |
Если известны номинальный коэффициент мощности и кратность максимального момента mк, то сила тока холостого хода при номинальном напряжении
I1н — ток статора при номинальной нагрузке, А.
При номинальных напряжениях и частоте переменного тока сила тока холостого хода от изменения нагрузки практически не зависит. Определить из опыта I0 нетрудно, если электродвигатель не соединен с рабочей машиной. По значению I0 можно в известной мере судить о состоянии электродвигателя, в частности после его ремонта.
К.п.д. электродвигателя при различной степени нагрузки

с достаточной для практических расчетов точностью определяют по формуле:
 — коэффициент потерь, представляющих собой отношение постоянных потерь к переменным при номинальной нагрузке.
— коэффициент потерь, представляющих собой отношение постоянных потерь к переменным при номинальной нагрузке.
К постоянным потерям, практически не зависящим от нагрузки, относятся механические потери, и потери в стали, к переменным — электрические потери в обмотках, зависящие от силы тока нагрузки, и добавочные потери — не учтенные ранее перечисленными видами потерь. Постоянные потери в значительной степени зависят от числа полюсов двигателя и его мощности.
Переменные потери при номинальной нагрузке определяют с помощью каталожных данных, приведенных в таблице 2.2.

где:
Рн — номинальная мощность двигателя;
ΔРн — полные потери двигателя при полной нагрузке;
ΔР0 — постоянные потери (Δm0= Δmмех + Δm–).
Таблица 2.2. Усредненное значение постоянных потерь мощности, рекомендуемое для практических расчетов
|
Число полюсов |
Номинальная мощность Рн, кВт |
Механические потери DРмех, %Рн |
Потери в стали DРс, %Рн |
|||
|
в пределах |
рекомендуемые при расчетах для электродвигателей типов |
в пределах |
рекомендуемые при расчетах |
|||
|
А2 |
АО2 |
|||||
|
2 |
10 40 |
0,7—4,9 |
0,9 |
3,4 |
3,1—3,9 2,0—2,9 |
3,5 2,5 |
|
4 |
10 40 |
0,4—1,4 |
0,5 |
0,9 |
3,0—5,6 2,2—3,4 |
4,3 2,8 |
|
6 |
10 40 |
0,32—0,82 |
0,44 |
0,6 |
3,0—6,0 2,1—3,0 |
4,5 2,6 |
|
8 |
10 40 |
0,25—0,62 |
0,3 |
0,45 |
3,5—4,8 2,0—3,3 |
4,2 2,6 |
При наличии кривой к.п.д. в функции нагрузки касательная к этой кривой в начальной точке отсекает на горизонтали, проведенной на уровне η + 1, отрезок р0, равный в масштабе абсцисс постоянным потерям (рис. 2).
Коэффициент мощности cosφ1 существенно зависит от реактивной мощности, потребляемой из сети, и степени нагрузки двигателя. Реактивная мощность, потребляемая из сети,
где:

Q’p, q1, q2— реактивная мощность, расходуемая на образование соответственно основного магнитного поля двигателя, полей рассеивания обмоток статора и ротора. Основную часть реактивной мощности составляет мощность Q’p которая из-за наличия воздушного зазора значительно больше, чем в трансформаторах, и определяет относительно большое значение намагничивающего тока: I0 = (0,2—0,6)Iн .
Обычно у трехфазных асинхронных электродвигателей при номинальной нагрузке cosφ1н= 0,7—0,92. Большие значения коэффициента мощности относятся к мощным двигателям с числом полюсов 2p = 2 и 4. При уменьшении нагрузки cosφ1 уменьшается до значения cosφ10 ≈ 0,09—0,18 при холостом ходе. Средние значения cosφ и к.п.д. трехфазных электродвигателей даны в таблице 2.3.

Рис. 2. Изменение к.п.д. асинхронного электродвигателя
в зависимости от нагрузки на валу
Таблица 2.3. Практические пределы значений к.п.д. и cos j трехфазных асинхронных двигателей основного исполнения
|
Мощность, кВт |
Синхронная частота вращения, об/мин |
К.п.д. |
cosφ |
|
0,8—1,1 |
3000 |
0,78—0,795 |
0,86—0,87 |
|
0,6—1,1 |
1500 |
0,72—0,78 |
0,76—0,8 |
|
0,4—1,1 |
1000 |
0,68—0,76 |
0,65—73 |
|
1,5—7,5 |
3000 |
0,805—0,87 |
0,88—0,89 |
|
1500 |
0,80—0,885 |
0,81—0,87 |
|
|
1000 |
0,79—0,87 |
0,75—0,82 |
|
|
2,2—7,5 |
750 |
0,795—0,865 |
0,69—0,81 |
|
10—22 |
3000 |
0,88—0,89 |
0,88—0,9 |
|
1500 |
0,885—0,9 |
0,87—0,9 |
|
|
1000 |
0,87—0,9 |
0,86—0,9 |
|
|
750 |
0,87—0,9 |
0,79—0,84 |
|
|
30—55 |
3000 |
0,89—0,91 |
0,9—0,92 |
|
1500 |
0,905—0,925 |
0,88—0,92 |
|
|
1000 |
0,9—0,925 |
0,88—0,92 |
|
|
750 |
0,9—0,925 |
0,84—0,9 |
Для к.п.д. и коэффициента мощности допускаются следующие отклонения: к.п.д. (η) машин мощностью до 50 кВт включительно: –0,15 (1 – η);
к.п.д. машин мощностью свыше 50 кВт: –0,1(1 – η);
коэффициента мощности (cosφ): 
, но не менее 0,02 и не более 0,07 по абсолютному значению.
Скольжение при номинальной нагрузке трехфазных асинхронных электродвигателей основного исполнения обычно составляет от 1,5 до 6,6%. Большие значения скольжения относятся к меньшим значениям мощности двигателя (табл. 2.4). Требование малой Sн связано с получением высокого к.п.д. и приводит к необходимости иметь малое активное сопротивление обмотки ротора.
Таблица 2.4. Частота вращения ротора трехфазного асинхронного электродвигателя основного исполнения при номинальной нагрузке и стандартной частоте тока 50 Гц
|
Число полюсов |
Частота вращения поля статора (синхронная) nc, об/мин |
Частота вращения вала ротора nн |
|
2 |
3000 |
2815—2940 |
|
4 |
1500 |
1400—1470 |
|
6 |
1000 |
930—985 |
|
8 |
750 |
720—740 |
|
10 |
600 |
580—585 |
Примечания:
1. В таблице приведены данные для двигателей мощностью от 1,1 до 100 кВт.
2. В серии А2 10-полюсные электродвигатели на синхронную частоту вращения 600 об/мин выпускаются с наименьшей мощностью 17 кВт.
3. Двигатели на 12 полюсов и более выполняют преимущественно мощностью выше 100 кВт.
При номинальном значении напряжения и частоты переменного тока скольжение с изменением нагрузки в пределах от холостого хода до номинальной практически изменяется пропорционально нагрузке (для двигателей, имеющих кратность максимального момента mк ≥ 1,6):
S = bSн,
где:
b — степень загрузки.
При работе электродвигателя с пульсирующей или ударной нагрузкой для
лучшего использования маховых масс целесообразно увеличивать номинальное скольжение. У электродвигателей с повышенным скольжением серии А2 и АО2 номинальное скольжение в зависимости от типоразмера и частоты вращения находится в пределах 6,6—16%.
Критическое скольжение Sк — величина скольжения, соответствующая максимальному моменту электродвигателя. Может быть определена по каталожным данным из выражений:
где:
mк — кратность максимального момента;
mn — кратность начального пускового момента;
Sн — относительное значение номинального скольжения.
Приближенно критическое скольжение

При значениях:
В среднем можно считать Sк = (4—5)Sн.
Начальная скорость нарастания температуры Δτ, °С/с, обмотки статора короткозамкнутых электродвигателей при заторможенном роторе и номинальном напряжении (без учета отдачи тепла)
где:
ki — кратность начального пускового тока по отношению к номинальному; γ1 — плотность тока (А/мм2) в обмотке статора при номинальной нагрузке; N — коэффициент, равный (для медной обмотки) 200, если процесс нарастания температуры начинается при холодном состоянии двигателя, и 145 — при нагретом состоянии двигателя.
При средних величинах ki = 6—7 и g1 = 5—6 А/мм2 интенсивность нарастания температуры (в нагретом состоянии двигателя) составляет:
Δτ = 5,45—10,6°С/с.
Для трехфазных асинхронных двигателей серии А2 и АО2 при пуске температура обмоток статора нарастает со скоростью не более 7°С/с. В таком случае пребывание двигателя под пусковым током возможно без вреда для изоляции в течение 10—15 с.
Напряжение трехфазных асинхронных электродвигателей должно соответствовать стандартам на данный вид электрической машины. Электродвигатели серии А2 и АО2 мощностью до 100 кВт выпускаются на напряжение 220 Δ, 380 Y и 500 Y В по требованию.
Трехфазные двигатели сельскохозяйственной серии АО2-СХ мощностью 2,2—10 кВт выпускают на 380 Y и мощностью 13—30 кВт при 1500 об/мин — на 380 Δ В.
Трехфазные двигатели серии 4А мощностью 0,12—0,37 кВт рассчитаны на напряжение 220 Δ, 380 Y, а мощностью 0,55—110 кВт — на 220 Δ, 380 Y и 380 Δ, 660 Y В.
Трехфазные асинхронные электродвигатели серии Д мощностью от 0,25 до 4 кВт основного исполнения поставляют для напряжений 220 Δ, 380 Y В.
На напряжение 380 В изготавливаются асинхронные двигатели мощностью до 400 кВт, поэтому применение напряжений 3 и 6 кВ необходимо только для более мощных двигателей.
Определение мощности электродвигателя без бирки

При отсутствии техпаспорта или бирки на двигателе возникает вопрос: как узнать мощность электродвигателя без таблички или технической документации? Самые распространенные и быстрые способы, о которых мы расскажем в статье:
- По диаметру и длине вала
- По габаритам и крепежным размерам
- По сопротивлению обмоток
- По току холостого хода
- По току в клеммной коробке
- С помощью индукционного счетчика (для бытовых электродвигателей)
Определение мощности двигателя по диаметру вала и длине
Простейшие способы определения мощности и марки двигателя – габаритные размеры – вал или крепежные отверстия. В таблице указаны длины и диаметры валов (D1) и длина (L1) для каждой модели асинхронного промышленного трехфазного мотора. Перейти к подробным габаритным размерам электродвигателей АИР
| Р, кВт | 3000 об. мин | 1500 об. мин | 1000 об. мин | 750 об. мин | ||||
| D1, мм | L1, мм | D1, мм | L1, мм | >D1, мм | L1, мм | D1, мм | L1, мм | |
| 1,5 | 22 | 50 | 22 | 50 | 24 | 50 | 28 | 60 |
| 2,2 | 24 | 28 | 60 | 32 | 80 | |||
| 3 | 24 | 32 | 80 | |||||
| 4 | 28 | 60 | 28 | 60 | 38 | |||
| 5,5 | 32 | 80 | 38 | |||||
| 7,5 | 32 | 80 | 38 | 48 | 110 | |||
| 11 | 38 | 48 | 110 | |||||
| 15 | 42 | 110 | 48 | 110 | 55 | |||
| 18,5 | 55 | 60 | 140 | |||||
| 22 | 48 | 55 | 60 | >140 | ||||
| 30 | 65 | |||||||
| 37 | 55 | >60 | 140 | 65 | 75 | |||
| 45 | 75 | 75 | ||||||
| 55 | 65 | 80 | 170 | |||||
| 75 | 65 | 140 | 75 | 80 | 170 | |||
| 90 | 90 | |||||||
| 110 | 70 | 80 | 170 | 90 | ||||
| 132 | 100 | 210 | ||||||
| 160 | 75 | 90 | 100 | 210 | ||||
| 200 | ||||||||
| 250 | 85 | 170 | 100 | 210 | ||||
| 315 | — | — |
Проверить мощность по габаритам и крепежным размерам
Таблица подбора мощности двигателя по крепежным отверстиям на лапах (L10 и B10):
Источник


